What is James Dyson Award?
The James Dyson Award is an international design award that celebrates, encourages and inspires the next generation of design engineers that focus on the field of
Our Work
G.A.R.I
2025
G.A.R.I is an autonomous chair-following system that attaches to various chairs for physiotherapy. It trails patients during gait exercises, providing immediate seating support to boost patient confidence and safety while freeing therapists to focus on care.
Exploring Domains
First Sprint

Our initial research involved examining the historical winners of the James Dyson Award. This revealed consistent trends, particularly in the areas of healthcare, humanitarian aid, and sustainable energy.

Approaching Stakeholder
First Sprint
To gain a holistic understanding, we consulted a diverse group of stakeholders across our selected domains. Our goal was to deeply elicit their operational requirements, identify persistent problems, and assess prevailing market trends.
Validating the Core Problem
First Sprint
First round of stakeholder interviews helped us pinpoint key healthcare domains.
Through a second round of interviews with physiotherapy professors, we confirmed the critical challenge. We learned that therapists must often divide their attention between physically supporting a patient and manually moving a follow-along chair, increasing safety risks and a a direct opportunity cost
Our stakeholder discussions allowed us to distill key design drivers for our solution. The system needed to be modular, adaptable to existing hospital furniture, and discreet to enhance patient comfort and social acceptance in a clinical setting.
Defining Critical User Needs
First Sprint
Visualising Solutions
Second Sprint
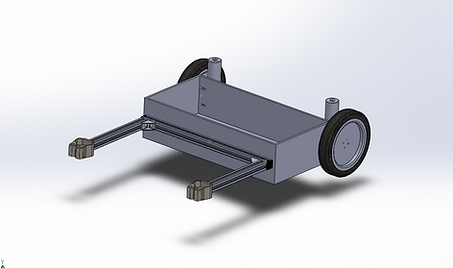
Our answer to the problem is a modular Automatic Moving Robot (AMR). This system is engineered to automate the movement of geriatric chairs, freeing up valuable staff time. Utilizing a custom-designed controller, the AMR leverages Bluetooth technology to accurately track and follow, ensuring secure and controlled movement at all times.
Feedback from Stakeholder
Second Sprint
Once the prototype is tested, we proceed to show the stakeholder and get some feedback from them. With their feedback and our testing, it shapes our development of the next sprint.
1st Prototyping Iteration
Second Sprint

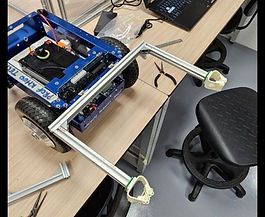
Our first physical prototype was built to test our core functionality. Mainly the gripping mechanism, robot base and tracking Auto-Follow technology.
We used two ESP32 microcontrollers to create a system that relied on Bluetooth RSSI (Received Signal Strength Indicator) to estimate the distance between the therapist and the chair.
Rigorous testing quickly revealed a fundamental flaw in our initial approach. The Bluetooth RSSI signal proved to be "not stable and accurate," making it unsuitable for the high degree of precision and safety required in a clinical environment.
In a clear demonstration of our agile methodology, we made the decisive pivot to abandon the failing Bluetooth method. We re-architected our solution around a more robust and reliable camera-based tracking system to ensure we delivered a high-quality product.
2nd Prototyping Iteration
Thrid Sprint
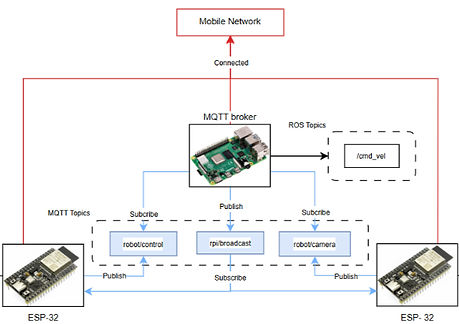
Our final system uses a camera to detect a visual ArUco marker on a simple controller. This visual data is processed in real-time by a Raspberry Pi running the Robot Operating System (ROS) to ensure precise and responsive following.
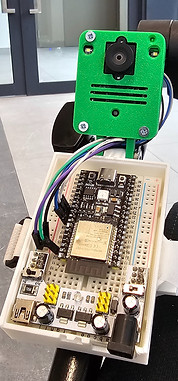



To ensure reliable data transmission between components, we implemented the lightweight MQTT protocol over a local Wi-Fi network. This created a robust and scalable IoT architecture connecting the controller, camera, and the robot's central processor.
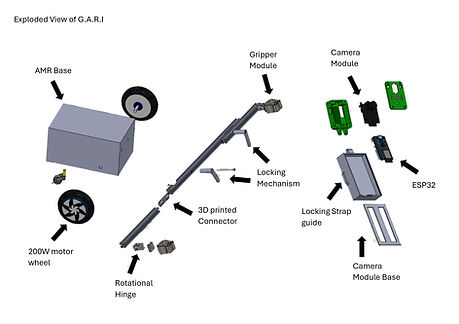
To meet the critical stakeholder needs for adaptability, we designed and fabricated a modular gripper. Featuring a strap locking and slider mechanism, this design allows the G.A.R.I. unit to be securely attached to a wide variety of existing hospital chairs.
The finalised G.A.R.I. system successfully integrates computer vision, robotics software, and a universal mechanical design. The result is a safe, reliable, and user-friendly solution that directly addresses the unmet needs of physiotherapists and their patients.

BIO


Kegan Lim, Leader
Goh Song Lin, Mechanical
Anas Anuar, Programmer
Luen Zhe Yuan, Electrical